


According to the integration of hardware, degree of realism, complexity, and the level of reproducibility, virtual validation methods can be divided into software-in-the-loop, SiL (approaches entirely based on numerical simulations), hardware-in-the-loop, HiL (using stand-alone sensor hardware), and vehicle-in-the-loop, VIL (real test vehicles with integrated and fully functional sensors). In VIVID, we aim at combining these methods according to their respective advantages and complementarities, and at merging virtual drive tests with real drive tests.
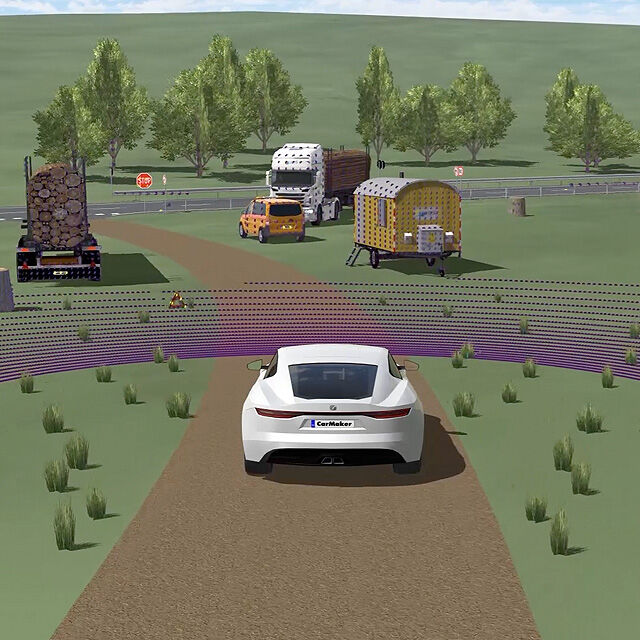
The core component is a high-fidelity sensor model developed in software which replaces the equivalent sensor hardware. The electromagnetic environment and signal propagation effects are simulated numerically using ray-tracing and other advanced electromagnetic simulation methods. The entire traffic and road infrastructure is simulated using established software models with a seamless connection to the layered model brought forward by the PEGASUS project family.
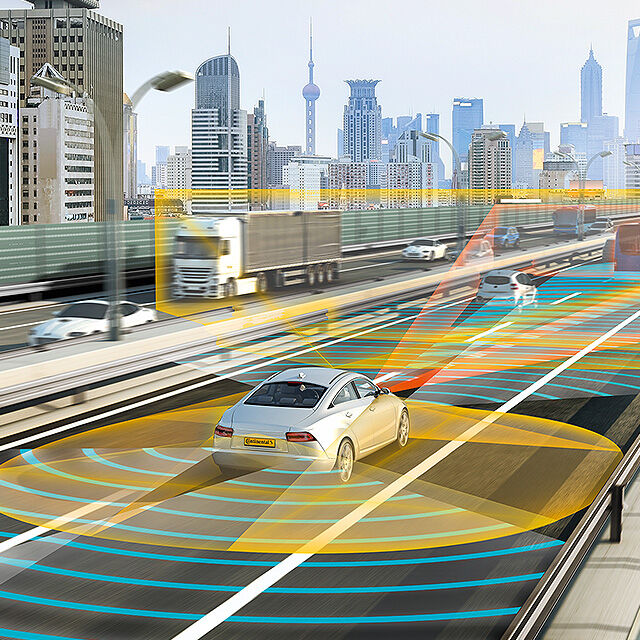
Stand-alone radar, camera, and lidar sensors are tested using direct injection of signals into the sensor hardware interfaces through cable connections or sometimes stimulated by target simulators, optical and laser projectors using over-the-air interfaces. Such a combination of approaches is greatly useful for testing complete sensor hardware and electronic control units (ECU).

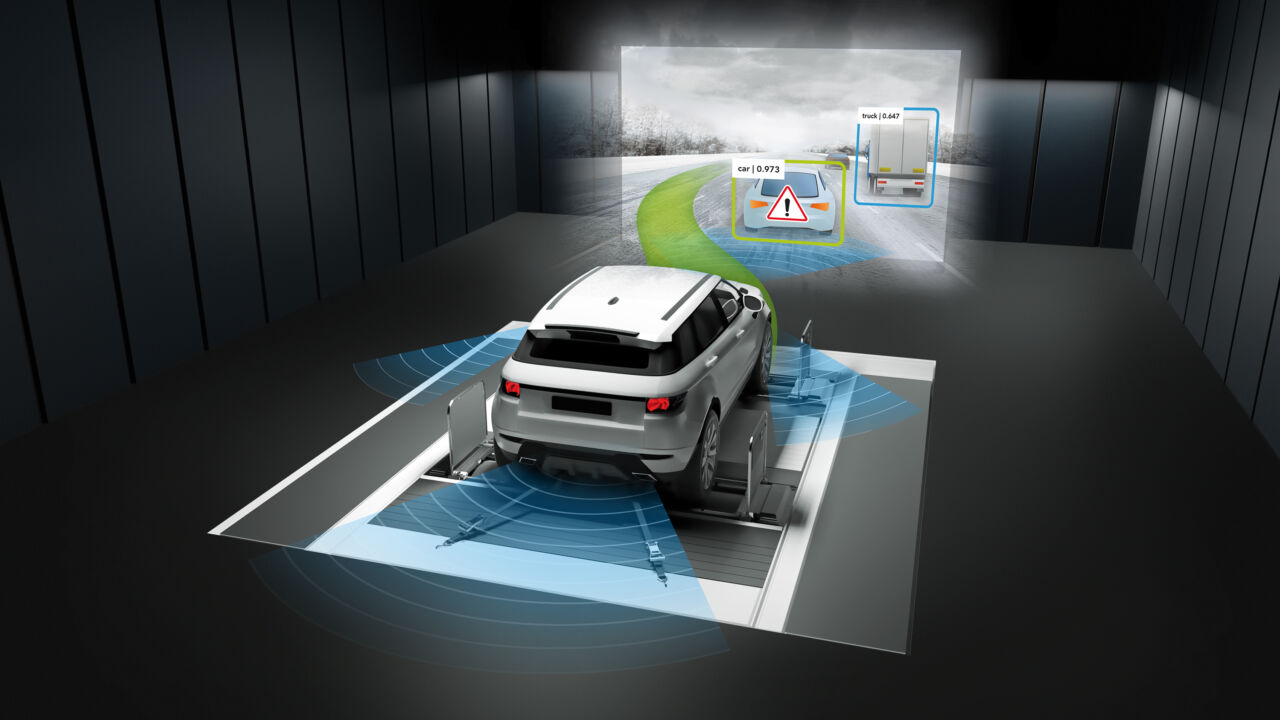
This technique is a unique feature of the German VIVID consortium. Radar and camera sensors installed in the vehicle-under-test are stimulated by digital radar target simulators and high-resolution monitors using over-the-air interfaces. No modification of the vehicle and no access to sensor hardware interfaces are required. The approach presents a drive-in virtual test environment and proves greatly useful for end-of-the-line testing of fully integrated and functional connected and automated vehicles.
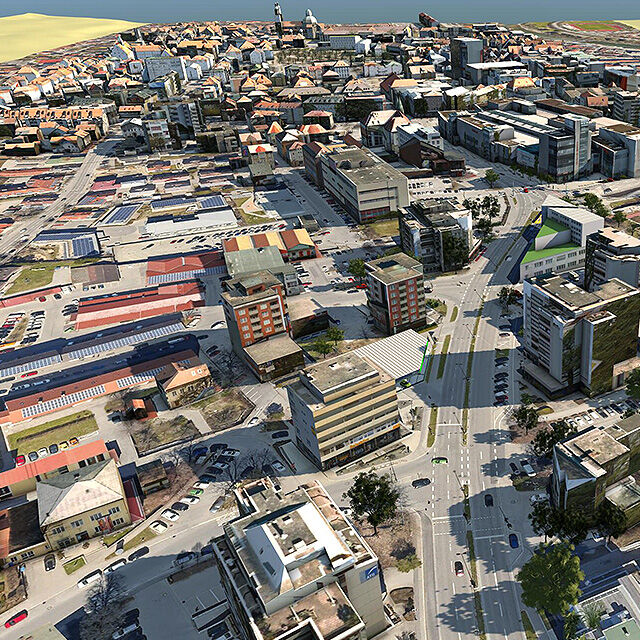
The city of Kempten has created its own Digital Twin, which consists of a digital surface model that is continuously processed from aerial survey data, terrestrial surveys, 360-degrees street image sequences, and other geodata collected by the city. The 3-dimensional city model has been made available to the VIVALDI project for scientific use with the kind permission of the city of Kempten.

Proving grounds are designated road and traffic environments with restricted access for conducting real drive tests. They represent a variety of real-world road infrastructure, traffic and road surface conditions for controlled manoeuvres. The test tracks have been carefully designed for tests of fully functional connected and automated vehicles before, during, or upon their homologation. The tests are conducted under realistic and controllable conditions, although at reduced reproducibility and repeatability as compared to SiL, HiL, or ViL approaches.