
The VIVID project proud to announce the availability of its white paper, which summarizes the main achievements and impacts of the joint German Japanese R&D project in the field of automated and connected driving. The white paper presents the solutions developed by the project, such as realistic models for scenarios, sensors, and environment, the virtual verification and validation tool chain and the driving intelligence validation platform. It also highlights the successful cooperation between the German partners as the VIVALDI consortium and the Japanese partners from the DIVP® consortium.
The white paper is available under this link: VIVID white paper
The glossary of the extended PEGASUS project family is now available on our website. This glossary is the result of a joint collaboration of VVMethods, SET Level, VIVID, and GaiaX4PLC. These projects are all focused on the validation of connected and automated driving, a topic that requires a clear and consistent terminology. The glossary aims at providing a common understanding of the terms related to this challenging technological field and their definitions in both English and German. You can access the glossary here: English version and German version . We hope you‘ll find it useful and informative.
In the scope of VIVALDI project, the traffic materials properties were measured in several campaigns. The measured scattering parameters and calculated relative permittivity for the studied materials are prepared in ASAM OpenMATERIAL format and available under GitHub.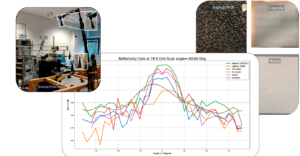
The Federal Ministry of Education and Research (BMBF) has published a broschure dedicated to the German-Japanese research cooperation on connected and automated driving, which can be accessed here. The R&D project VIVID was ranked among the most succesfull examples of bi-national cooperation on automotive innovation.
1.01 MBFor more information please head to the “NIED” article in the News and Events section.
More information can be found in the article “CARISSMA” in our News and Events section.
For more information, see the article Radar measurements in Virtual Road Simulation and Test Area in our News and Events section.
Virtual testing always entails the modeling of automotive perception sensors and their environment. In the real world, these sensors are not only exposed to global weather conditions, like rain, fog, snow etc., but environmental influences also appear locally. Road spray is one of the more challenging occurrences, because it involves other moving objects in the scenario. This data set is designed to systematically analyze the influence of road spray on lidar and radar sensors. It consists of sensor measurements of two vehicle classes driving over asphalt with three water levels to differentiate multiple influence factors.
There are two different kinds of logical scenarios:

In the real world, perception sensors are exposed to adverse influences by environmental conditions like rain, fog, snow etc. Therefore, such influences need to be reflected in simulation models, but prior to modeling, they need to be systematically assessed in the real world. This measurement campaign consists of a static test setup over the course of 6 months in fall, winter and spring containing weather conditions like rain, snow, fog and direct sun light in different intensities. The test was setup on a free area on the August-Euler-Airfield in Darmstadt, Germany. The first element of the test setup is a measuring station, where automotive perception sensors and weather sensors as reference are connected to a measurement PC and measurements are triggered automatically. The second element of the setup consists of multiple reference targets for radar and lidar at distances of 50 to 70 m. These targets provide defined reflectivities to compare the influence of different environmental conditions on the sensor’s intensity readings. The corresponding data set will be publicly available shortly under https://www.fzd-datasets.de/

A key part of virtual testing of automated driving functions is the implementation and validation of perception sensor models. With this measurement campaign, radar cross-sections (RCS) of multiple objects with different aspect angles are examined. The experiment is set up as a slalom course to measure the RCS under realistic conditions in a real world environment on the August-Euler-Airfield in Darmstadt, Germany. The slalom was set up in a reproducible manner by placing markers and pylons on the test track. The ego vehicle and the objects drove through the slalom at a constant speed. Each test drive contains 10 slalom periods and for each object 10 test drives were conducted. The dataset will be available in the near future under https://www.fzd-datasets.de/

Presentation on the workshop “Virtual Validation of ADAS with Automotive Sensors”, European Microwave Week 2023, Berlin
2.23 MBPresentation on the workshop “Virtual Validation of ADAS with Automotive Sensors”, European Microwave Week 2023, Berlin
2.68 MBPresentation on the workshop “Virtual Validation of ADAS with Automotive Sensors”, European Microwave Week 2023, Berlin
3.87 MBPresentation on the workshop “Virtual Validation of ADAS with Automotive Sensors”, European Microwave Week 2023, Berlin
2.92 MBPresentation on the workshop “Virtual Validation of ADAS with Automotive Sensors”, European Microwave Week 2023, Berlin
2.05 MBYou can find all videos on our video overview page.
Watch the report on the completion of the first test phase at Allgäu-TV.