

Virtual verification and validation methods complement real drive tests in achieving safety assurance for connected and automated driving. The key research questions are: “How can the safety of connected and automated driving functions be evaluated and assured?” „How realistic is realistic enough?“ „How safe is safe enough?“ In the framework of VIVID, industrial and academic partners work on the design and implementation of a high-fidelity virtual validation tool chain, connecting software-based traffic and sensor simulations with environmental and signal propagation modelling as well as installed sensor performance testing in virtual environments.

The key research questions will be tackled for multiple environment perception sensor platforms and through the application of complementary test methods from virtual (Software-in-the-loop (SiL), Hardware-in-the-loop (HiL), Over-the-air / Vehicle-in-the-loop (OTA/ViL)) up to real (FoT).
The tool chain developed thereby is laid out such as to conform to the Open Standard Ontology of the ASAM e.V. Standards. Through our tests and measurement results we aim at establishing fidelity metrics for the virtual validation and simulation tool chain. This will ultimately lead to a robust knowledge base for future harmonization and globalization activities.

The Federal Ministry of Education and Research (BMBF) has published a broschure dedicated to the German-Japanese research cooperation on connected and automated driving, which can be accessed here. The R&D project VIVID was ranked among the most succesfull examples of bi-national cooperation on automotive innovation.
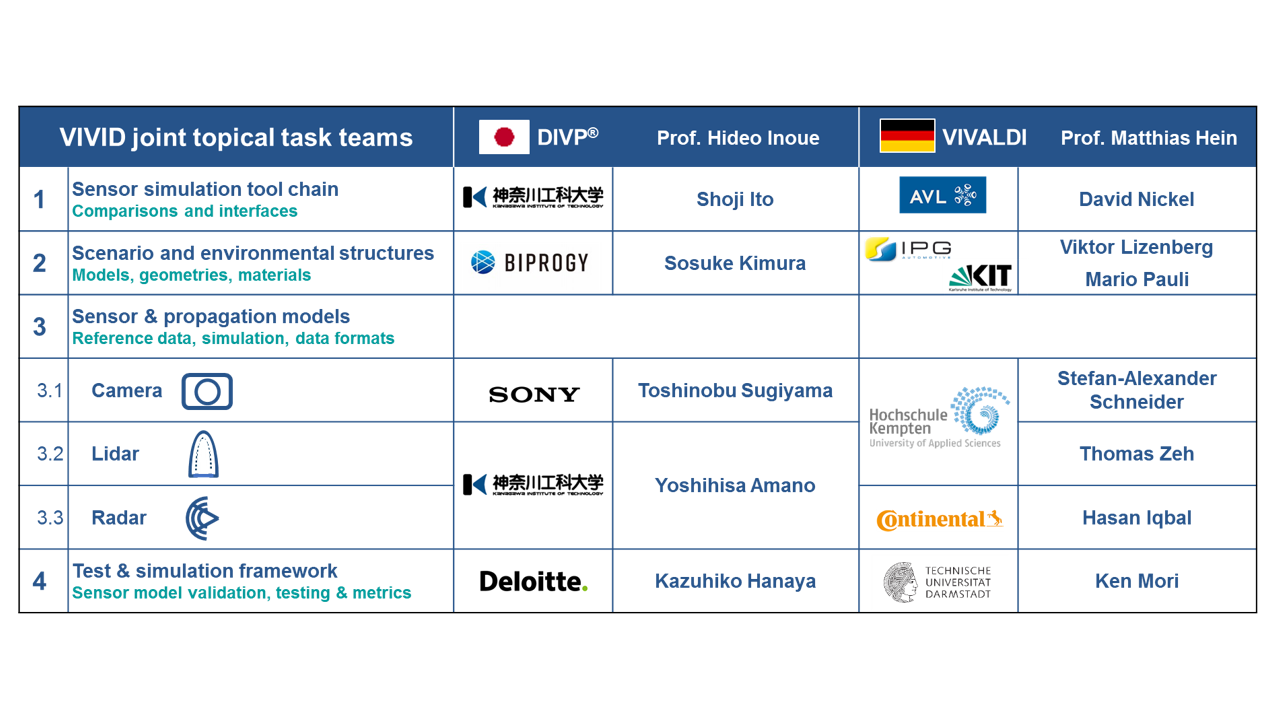
The R&D cooperation of the German and Japanese project consortia is strongly connected through joint topical task teams (JT) on dedicated research topics covering the three main areas Scenarios – Sensors – Test and validation metrics.
